Introducing
Modern Control Systems Trainer provides a practical hands-on experience on rapid-prototyping of basic concepts of feedback control systems in practical real-world applications.
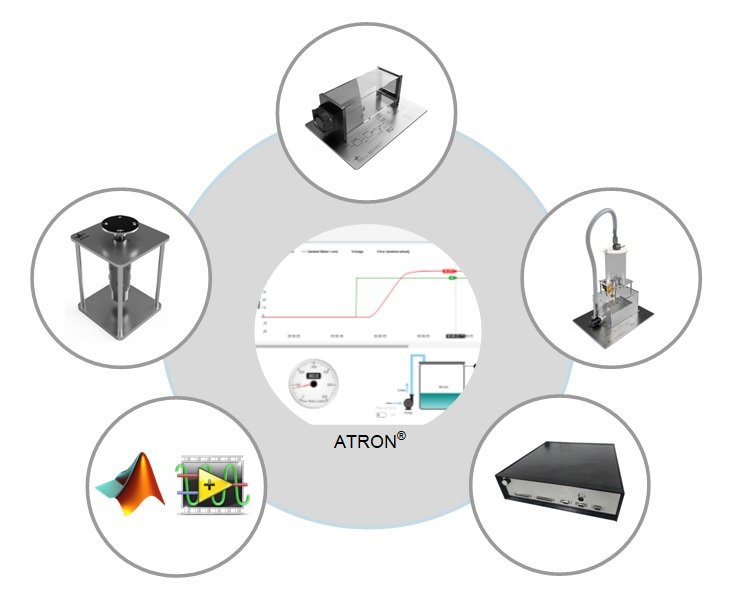
It is an all-in-one package comprised of three systems: water level control, DC motor speed and position control and air temperature control.

Position & Speed Control System
Both the position and speed of the DC motor is regulated in this system. The actual motor position is measured by the optical incremental encoder and fedback to the control system. The speed signal is reconstructed from the same sensor. Due to friction in the bearings and mating parts, the controlled system is subjected to disturbance.
The rapid-prototyping of the control system by using ATRON® software enables the students to both observe the desired, actual, error and actuator control signals and tune the controller parameters on-the-fly. For the purpose of record and off-line observation, signals can be traced back in time.

Water Level Control
The level of the liquid in the upper tank is controlled by regulating the water flow rate supplied by the pump connected to the lower tank. The actual liquid level is measured by the sensor and fedback to the control system. Due to loss to lower tank through orifice, the controlled system is subjected to disturbance.
The rapid-prototyping of the control system by using ATRON® software enables the students to both observe the desired, actual, error and actuator control signals and tune the controller parameters on-the-fly. For the purpose of record and off-line observation, signals can be traced back in time.

Air Temperature Control
The temperature in the chamber is controlled by regulating the air flow rate supplied by the fan and heater system. The actual chamber temperature is measured by the sensor and fedback to the controller. Due to heat loss to environment, the controlled system is subjected to disturbance.
The rapid-prototyping of the control system by using ATRON® software enables the students to both observe the desired, actual, error and actuator control signals and tune the controller parameters on-the-fly. For the purpose of record and off-line observation, signals can be traced back in time.
