
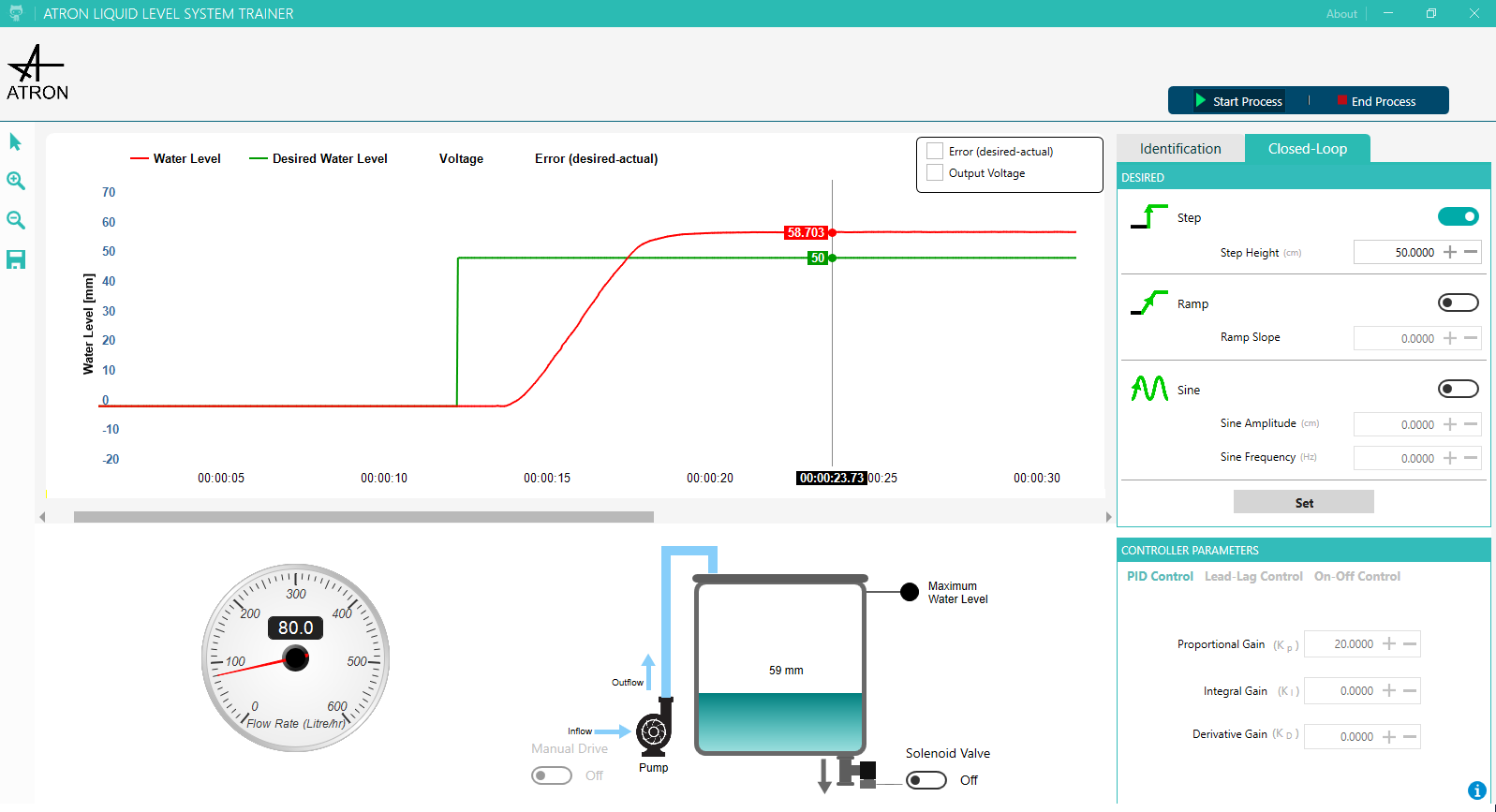

The level of the liquid in the upper tank is controlled by regulating the water flow rate supplied by the pump connected to the lower tank. The actual liquid level is measured by the sensor and fedback to the control system. Due to loss to lower tank through orifice, the controlled system is subjected to disturbance.
The rapid-prototyping of the control system by using ATRON® software enables the students to both observe the desired, actual, error and actuator control signals and tune the controller parameters on-the-fly. For the purpose of record and off-line observation, signals can be traced back in time.
Simulations are provided using third- party software such as MATLAB® and LabVIEW.
• Step/sine response of the first and second order systems
• Identification of the time constant
• Open loop gain identification
• Transfer function identification
• Bode diagram
• Steady-state error compensation
- Proportional (P) controller
- Proportional-Integral-Derivative(PID) controller
- Lead-Lag Compensator
- Ziegler-Nichols Tuning
- Modeling, identification and control
- Simulations and rapid-prototyping
